Published On May 10, 2023
Authors:
Mahdi Javadi, Daniel Harnack, Paula Stocco, Shivesh Kumar, Shubham Vyas, Daniel Pizzutilo, and Frank Kirchner
Abstract:
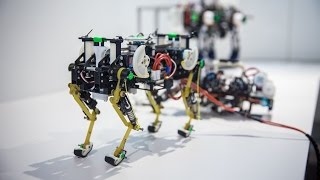
Brachiation is a dynamic, coordinated swinging maneuver of body and arms used by monkeys and apes to move between branches. As a unique underactuated mode of locomotion, it is interesting to study from a robotics perspective since it can broaden the deployment scenarios for humanoids and animaloids. While several brachiating robots of varying complexity have been proposed in the past, this paper presents the simplest possible prototype of a brachiation robot, using only a single actuator and unactuated grippers. The novel passive gripper design allows it to snap on and release from monkey bars, while guaranteeing well defined start and end poses of the swing. The brachiation behavior is realized in three different ways, using trajectory optimization via direct collocation and stabilization by a model-based time varying linear quadratic regulator (TVLQR) or model-free proportional derivative (PD) control, as well as by a reinforcement learning (RL) based control policy. The three control schemes are compared in terms of robustness to disturbances, mass uncertainty, and energy consumption. The system design and controllers have been open-sourced. Due to its minimal and open design, the system can serve as a canonical underactuated platform for education and research.
More information:
Github
https://github.com/dfki-ric-underactu...
Projects
M-RoCK: https://robotik.dfki-bremen.de/en/res...
VeryHuman: https://robotik.dfki-bremen.de/en/res...
Funding
This work has been supported by the M-RoCK (FKZ 01IW21002) and VeryHuman (FKZ 01IW20004) projects funded by the German Aerospace Center (DLR) with federal funds from the Federal Ministry of Education and Research (BMBF) and is additionally supported with project funds from the federal state of Bremen for setting up the Underactuated Robotics Lab (201-342-04-2/2021-4-1). The fifth author acknowledges support from the Stardust Reloaded project which has received funding from the European Union’s Horizon 2020 research and innovation program under the Marie Skłodowska-Curie grant agreement No 813644.