Published On Jul 1, 2018
#Drone #Controller #UAVControl #ModelBasedDesign
Hi Everyone,
In this video I walk you through designing and implementing a 2D linear controller for a quad rotor moving along a specified trajectory.
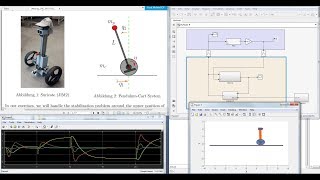
The quad is commanded to move across a trajectory defined as a function of time x(t), z(t). The equations of motion are first linearized and then implemented in Simulink.
This tutorial covers the following fundamental control concepts
1) Linearization
2) Under-actuation
3) Coupling
4) PID/PD/PI control
5) Tuning
6) Inner Loop Control
Feel free to leave your feedback below.
For more videos like this, tutorials, and tips & tricks, subscribe to this channel at:
/ vinayak678matlabsimulink
Best Wishes
VDEngineering
~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning:
https://www.udemy.com/course/autonomo...
My Instagram: / vinayak_desh
My Website: https://www.vinayakd.com/