Published On Aug 22, 2022
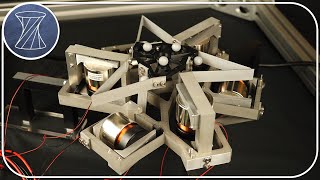
The T-Flex is a motion stage hexapod for precision manipulation. It achieves a large range of motion and a high repeatability by using custom designed flexure joints. The T-Flex has been developed at the Precision Engineering lab (prof.dr.ir. Dannis Brouwer).
Details can be found in the following publications in Elsevier's Precision Engineering journal:
- Naves et al. 2021. "T-Flex: A fully flexure-based large range of motion precision hexapod".
https://doi.org/10.1016/j.precisionen...
- Naves et al. 2020. "Flexure-based 60 degrees stroke actuator suspension for a high torque iron core motor".
https://doi.org/10.1016/j.precisionen...
- Naves et al. 2019. "Large stroke high off-axis stiffness three degree of freedom spherical flexure joint".
https://doi.org/10.1016/j.precisionen...
Additional details can be found in the PhD thesis of Mark Naves, principal designer of the T-Flex:
https://research.utwente.nl/en/public...
Research team:
Mark Naves, Marijn Nijenhuis, Bram Seinhorst, Wouter Hakvoort, Dannis Brouwer
Film by:
Joost Könemann, Stijn Scheepers, Marijn Nijenhuis, Dannis Brouwer
Chapters in this film:
00:00 T-Flex overview
01:15 Large range of motion
02:11 Kinematics
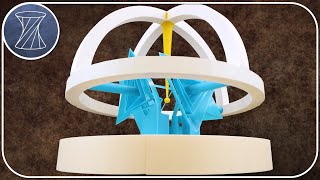
02:45 Spherical joints, exploded view
03:18 Actuated revolute joints, exploded view
03:51 Conclusion
Funding:
VIDI (14152), Dutch Research Council NWO TTW
MexFlex (16210), Dutch Research Council NWO TTW
Sectorplan Techniek